Теорема о жестком рычаге Н.Е. Жуковского
Н.Е.Жуковский показал, что равновесию механизма с одной степенью свободы соответствует равновесие некоторого рычага, и предложил способ построения и нагружения такого рычага. Теорему Н.Е.Жуковского можно сформулировать так:
Если векторы всех сил, приложенных к различным точкам звеньев и уравновешенных на механизме, перенести параллельно самим себе в одноимённые точки повёрнутого на 90° плана скоростей, приняв фигуру плана за жесткий рычаг, то сумма моментов всех указанных сил относительно полюса плана будет равна нулю.
Пример 6.3.
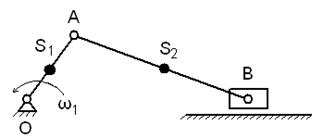
Для кривошипно-ползунного механизма определить уравновешивающую силу .
Решение.
1.Уравновешивающую силу  приложим в точке А перпендикулярно кривошипу АО. Построим
приложим в точке А перпендикулярно кривошипу АО. Построим
план скоростей и повернем его на 90°. В соответствующих точках плана скоростей приложим векторы сил, сохраняя их направления, момент  заменим парой сил
заменим парой сил  и каждую силу перенесем на план.
и каждую силу перенесем на план.
2.Составим уравнение моментов всех сил относительно полюса  :
:
 .
.
Решая уравнение, получим:
Длины всех плеч измерены на расчетной схеме .
План скоростей, повернутый на 90○
План скоростей
Таким образом, с помощью теоремы Жуковского можно:
1.Определить уравновешивающую силу , не проводя силового расчета;
2.Проверить значение уравновешивающей силы , полученной из силового расчета. Погрешность расчетов составляет  %. Погрешность не должна превышать 20 %.
%. Погрешность не должна превышать 20 %.
Дата добавления: 2016-03-05; просмотров: 1582;