Измерительные преобразователи
Одним из основных положений современной теории измерительных устройств является положение об измерительном преобразователе. В соответствии с ним измерение рассматривается как процесс приема и преобразования измерительной информации об измеряемой величине. Структуру измерительных устройств в связи с этим представляют в виде совокупности измерительных преобразователей, осуществляющих функциональные измерительные преобразования сигналов различной физической природы.
Определения терминов «измерительный преобразователь», «первичный измерительный преобразователь», «датчик» приведены в РМГ 29-99 «Государственная система обеспечения единства измерений. Метрология. Основные термины и определения» в разделе 6 «Средства измерительной техники».
Измерительный преобразователь – техническое средство с нормируемыми метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи. Измерительный преобразователь или входит в состав какого-либо измерительного прибора (измерительной установки, измерительной системы и др.), или применяется вместе с каким-либо средством измерений.
По характеру преобразования различают аналоговые, цифро-аналоговые, аналого-цифровые преобразователи.
Аналоговый измерительный преобразователь — измерительный преобразователь, преобразующий одну аналоговую величину (аналоговый измерительный сигнал) в другую аналоговую величину (измерительный сигнал);
Аналого-цифровой измерительный преобразователь — измерительный преобразователь, предназначенный для преобразования аналогового измерительного сигнала в цифровой код;
Цифро-аналоговый измерительный преобразователь — измерительный преобразователь, предназначенный для преобразования числового кода в аналоговую величину.
По месту в измерительной цепи различают первичные и промежуточные преобразователи.
Измерительная цепь – совокупность элементов средств измерений, образующих непрерывный путь прохождения измерительного сигнала одной физической величины от входа до выхода. Измерительную цепь измерительной системы называют измерительным каналом.
Первичный измерительный преобразователь – измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, т.е. первый преобразователь в измерительной цепи измерительного прибора (установки, системы). Примеры: терморезистор, фотоэлемент. В одном средстве измерений может быть несколько первичных преобразователей. Пример: ряд первичных преобразователей измерительной контролирующей системы, расположенных в разных точках контролируемого объекта.
Промежуточный измерительный преобразователь – измерительный преобразователь, занимающий место в измерительной цепи после первичного преобразователя.
По другим признакам различают также:
Передающий измерительный преобразователь — измерительный преобразователь, предназначенный для дистанционной передачи сигнала измерительной информации;
Масштабный измерительный преобразователь — измерительный преобразователь, предназначенный для изменения измерительного сигнала в заданное число раз.
Датчик – конструктивно обособленный первичный преобразователь, от которого поступают измерительные сигналы (он «дает» информацию). Примеры: датчик температуры, датчик силы, датчик перемещения. Датчик, используемый в области измерений ионизирующих излучений, называют детектором.
В большинстве случаев сам датчик представляет собой конструктивную совокупность одного или нескольких измерительных преобразователей (первичных и промежуточных) и сопутствующих им конструктивных элементов, предназначенную для измерения (контроля) конкретной физической величины и выполненную в виде единой конструкции. В этом случае входящий в состав датчика измерительный преобразователь, на который непосредственно воздействует измеряемая физическая величина, называют в некоторых случаях чувствительным элементом.
По РМГ 29-99 чувствительный элемент— это часть измерительного преобразователя в измерительной цепи, воспринимающая входной измерительный сигнал.
В ряде случаев четкую границу между терминами «первичный измерительный преобразователь», «датчик», «чувствительный элемент» провести достаточно трудно. Все зависит от измерительной задачи, выбранных типа и конструкции датчика и т.д.
Выходные сигналы датчиков в общем случае могут быть электрическими, пневматическими, гидравлическими и др. В современных измерительных системах, как правило, используют датчики с электрическим выходным сигналом, так как электроизмерительные схемы имеют ряд важных преимуществ перед пневматическими, гидравлическими и др.: быстродействие; возможность автоматизации процессов измерения и представления результатов измерений в форме, удобной для обработки на ЭВМ; многофункциональность и гибкость, позволяющие, при наличии программирующего устройства, оперативно перестраивать структуру измерительных каналов.
Для преобразования измеряемых величин в удобную для передачи и восприятия форму используются различные физические явления, обладающие достаточно строгими закономерностями, например, тензорезистивный и пьезоэлектрический эффекты, эффекты изменения электрической емкости, омического сопротивления, электромагнитные явления и т.д.
Механические величины, для контроля которых используются измерительные преобразователи, можно классифицировать по группам, например, как приведено ниже.
1) Линейные и угловые размеры, геометрические параметры профилей и шероховатостей поверхностей, уровни сыпучих веществ и жидкостей в различных сосудах (баках, танкерах, паровых котлах и т. п.), перемещения режущего инструмента относительно обрабатываемой детали, параметры износа трущихся частей различных механизмов, биения валов, расстояния и т. д.
Диапазон, охватываемый величинами этой, группы, простирается от долей микрона до тысяч метров, т. е. составляет примерно десять порядков. Диапазон угловых размеров равен 3— 4 порядкам.
2) Различного рода силовые воздействия. Это механические напряжения в деталях и конструкциях машин и сооружений, силы, крутящие моменты, давления жидкостей и газов, акустические шумы, разности давлений и т. п.
Диапазоны значений величин этой группы, как правило, весьма широки. Например, в вакуумной технике приходится измерять давления до 1,3-10-8 Па, а в технике высоких давлений до 108 Па и выше, следовательно, диапазон давлений охватывает ~16 порядков. Примерно такой же диапазон занимают значения сил, встречающихся в технике и научных исследованиях.
3) Так называемые параметры движения. Это перемещения объектов в пространстве, линейные и угловые скорости и ускорения перемещений. Значения параметров этой группы могут достигать астрономических цифр (космические расстояния и скорости). В эту группу входят также параметры вибраций (вибрационные перемещения, скорости и ускорения), скорости вращения валов и т. д.
Кроме перечисленных, измеряемые величины могут характеризовать свойства вещества (концентрация, pH-уровень, влажность и др.), электрические процессы (ток, напряжение, мощность), оптические параметры и т.д.
Приведенные примеры говорят о том, что существует множество типов и модификаций датчиков, отличающихся принципами действия, разными вариантами выполнения схемы и конструкции.
Все датчики с электрическим выходным сигналом можно разделить на две большие категории: генераторные и параметрические.
В генераторных датчиках осуществляется преобразование измеряемого параметра непосредственно в электрический сигнал (т. е. они генерируют электрическую энергию). К таким датчикам относятся:
пьезоэлектрические датчики, использующие пьезоэлектрический эффект, возникающий в некоторых кристаллах (кварц, турмалин: и др.), в зависимости от значений и характера прилагаемых к кристаллу упруго деформирующих сил;
индукционные (магнитоэлектрические) датчики, использующие явление электромагнитной индукции — наведение ЭДС в электрическом контуре, в котором меняется величина магнитного потока;
фотоэлектрические датчики, использующие зависимость ЭДС фотоэлемента с запирающим слоем от освещенности;
термоэлектрические датчики (термопары), использующие явление термоэлектрического эффекта, возникающего в цепи термопары, в зависимости от разности температур ее рабочего и свободного спаев;
датчики электрических потенциалов, использующие зависимость концентрации водных растворов от концентрации водородных ионов в растворе, которую можно определить по потенциалу, возникающему на границе различных электродов, опущенных в контролируемый раствор;
гальванические датчики, использующие зависимость ЭДС гальванического элемента от состава и концентрации растворов электролитов.
В параметрических датчиках измеряемая величина преобразуется в параметр электрической цепи — сопротивление, индуктивность, емкость и т. п., причем датчик питается от внешнего источника электрической энергии. К таким датчикам относятся:
емкостные датчики, использующие зависимость электрической, емкости конденсатора от размеров и взаимного расположения его обкладок при воздействии на него измеряемого параметра;
электромагнитные и магнитоэлектрические датчики, которые объединяют три типа датчиков — индуктивные, трансформаторные и магнитоупругие: индуктивные датчики основаны на зависимости индуктивности дросселя от длины и площади сечения его сердечника, от взаимного расположения обмоток дросселя и частей магнитопровода. Трансформаторные датчики основаны на изменении взаимной индуктивности обмоток преобразователя под воздействием механических перемещений ферромагнитного сердечника. Магнитоупругие датчики основаны на принципе изменения магнитной проницаемости (или индукции) ферромагнитных тел под воздействием приложенных к ним механических сил или напряжений;
электроконтактные датчики, коммутирующие электрическую цепь под воздействием измеряемого параметра;
потенциометрические (реостатные) датчики, использующие зависимость сопротивления реостата от положения его движка, который может перемещаться под воздействием контролируемого параметра;
жидкостные (электролитические) датчики, принцип действия которых основан.на изменении сопротивления электропроводящей жидкости при взаимном перемещении электродов или изменении геометрической формы корпуса чувствительного элемента;
тензорезисторные (тензометрические) датчики, использующие свойство тензопреобразователя изменять свое сопротивление при упругих деформациях. Они подразделяются в зависимости от материала тензорезистора на проводниковые (проволочные и фольговые) и полупроводниковые;
датчики контактного сопротивления, использующие зависимость контактного сопротивления между поверхностями двух твердых тел от усилия их сжатия;
магнитомодуляционные датчики, представляющие собой устройства, содержащие магнитную систему и магнитометр, при взаимном перемещении которых меняется напряженность магнитного поля| пронизывающего магнитометр, и, соответственно, выходной сигнал;
датчики термосопротивления, пьезосопротивления, фотосопротивления и др., использующие свойства изменять свое сопротивление соответственно в зависимости от температуры, механического напряжения, освещенности и т. д.
К основным характеристикам первичных измерительных преобразователей относятся:
· Входная величина, воспринимаемая и преобразуемая датчиком;
· Выходная величина, используемая для передачи информации; она обычно модулируется по амплитуде, по временному признаку (частота, фаза и др.), по кодовому признаку, а также по пространственному признаку (чередование сигналов в каналах связи).;
· Статическая характеристика датчика. Для каждого измерительного преобразователя можно установить связь между выходной и входной величинами:

Математическое или графическое описание этой связи называется функцией преобразования измерительного преобразователя (или для датчика в целом - функцией преобразования датчика)
Отношение изменения выходной величины DY к соответствующему изменению входной величины DX называется чувствительностью датчика:
S = DY / DX
В общем случае, если функция преобразования нелинейна, отношение изменения выходной величины к соответствующему изменению входной величины для любого Xi определяется коэффициентом преобразования
Кi = DYi / DXi ,
а чувствительность является функцией входной величины.
Если зависимость между выходной и входной величинами является линейной, то чувствительность преобразователя не зависит от входной величины:
Y = SX ,
В этом случае чувствительность и коэффициент преобразования равны, поэтому для линейных датчиков используют как термин «чувствительность», так и термин «коэффициент преобразования».
Датчик, выполненный в соответствии с приведенной ниже структурной схемой, называется датчиком прямого преобразования. Чувствительность такого датчика определяется произведением чувствительностей отдельных преобразователей:
S = S1 S2 … Sn-1 Sn
и может быть найдена для линейной функции преобразования как отношение выходной величины датчика к входной:
S = Y / X

Наиболее приемлемой статической характеристикой для большинства датчиков является линейная характеристика. Для линеаризации характеристик датчиков, используют различные методы, например, усилители-линеаризаторы, программные методы и др.
Наряду с линейными широкое распространение нашли датчики с различными релейными характеристиками.
· Динамическая характеристика датчика описывает поведение датчика при изменениях входной величины и определяется внутренней структурой датчика и его элементов. Динамические свойства датчиков могут быть определены передаточными функциями, переходными, импульсно-переходными (весовыми), амплитудно-частотными, амплитудно-фазовыми и другими характеристиками.
· Порог чувствительности датчика — это минимальное изменение входной величины, вызывающее заметно различимое изменение выходного сигнала.
· Основная погрешность датчика — максимальная разность между получаемой в нормальных условиях величиной выходного сигнала и его номинальным значением, определяемым по статической характеристике для данной входной величины. Основная погрешность выражается как в абсолютных, так и в относительных единицах. В последнем случае погрешность обычно относят к разности предельных значений выходной величины и выражают в процентах (класс точности).
· Дополнительные погрешности датчика — погрешности, вызываемые изменениями внешних условий по сравнению с нормальными условиями. Выражаются обычно в процентах, отнесенных к изменению вызвавшего их фактора (например, температурная погрешность — 1,5 % на 10 0С).
Структурная схема датчика в наиболее простых случаях включает в себя один или два элементарных преобразователя. В простейшем случае он может состоять только из одного преобразователя (рис. 1,а), осуществляющего преобразование измеряемой неэлектрической величины X в электрическую величину U. Однако в подавляющем большинстве случаев преобразователи строятся по структурным схемам, состоящим из чувствительного элемента, воспринимающего энергию X измеряемого параметра и преобразующего ее в промежуточную неэлектрическую величину Х1, и преобразователя, предназначенного для преобразования промежуточной неэлектрической (обычно механической) величины Х{ в электрический сигнал U (рис. 1, б). В отдельных случаях между чувствительным элементом и преобразователем располагается передаточный механизм или несколько промежуточных преобразователей (структура каскадного соединения, рис, 1,в). Часто встречаются более сложные структуры: дифференциальная схема (рис. 1,г), например, в индуктивных датчиках давления, и компенсационная схема (рис. 1,д), например, в трансформаторных датчиках линейных перемещений.
В более общем виде подавляющее большинство датчиков неэлектрических параметров можно представить обобщенной структурной схемой (см.рис.1). Показанная на рисунке электрическая схема ЭС выполняет функцию дополнительного преобразования электрического сигнала с выхода ПНЭ в электрический сигнал U3. Например, в некоторых тензометрических датчиках электрическая схема служит для преобразования электрического сопротивления тензорезистора в постоянное напряжение.
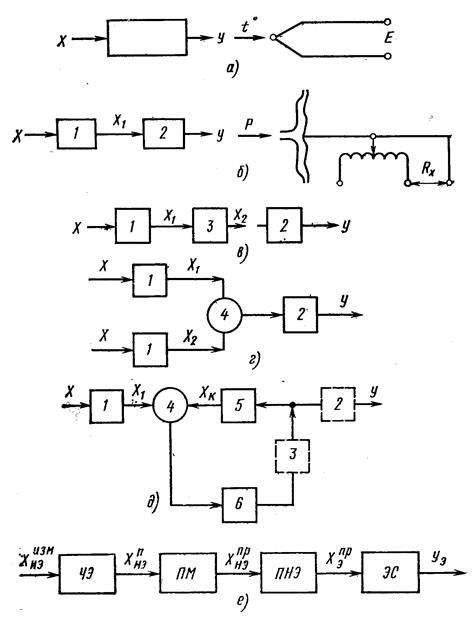
Рис. 1 – Структурные схемы основных типов датчиков: а — структурная однозвенная простейшая схема и пример датчика (термопары), состоящего только из одного преобразователя; б — структурная схема и пример датчика (потенциометрический датчик давления), состоящего из чувствительного элемента 1 и выходного преобразователя 2; в — схема каскадного соединения (3 — промежуточный преобразователь); г — дифференциальная схема (4 — вычитающий элемент); д — компенсационная схема (5 — усилитель; 6 — генератор компенсирующей величины); е — обобщенная структурная схема датчика неэлектрической величины: ЧЭ — упругий чувствительный элемент (первичный преобразователь); ПМ — передаточный механизм (промежуточный преобразователь); ПНЭ — преобразователь неэлектрической величины в электрическую (промежуточный преобразователь); ЭС — электрическая схема (вторичный преобразователь); Хв9, Ха в У8 — соответственно входной неэлектрический, входной электрический и выходной электрический сигналы
| <== предыдущая лекция | | | следующая лекция ==> |
| ПАЛЬЧИКИ – СОЛДАТИКИ | | | Измерительные системы |
Дата добавления: 2016-01-11; просмотров: 12290;