Частотный метод измерения дальности в РЛС непрерывного и квазинепрерывного излучения.
Измерение дальности в радиолокации производится путем фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала. Временной интервал между этими моментами называется временем запаздывания отраженного сигнала
 (2.1)
(2.1)
где Д – расстояние между РЛС и целью;
 – скорость распространения радиоволн.
– скорость распространения радиоволн.
Метод фиксации моментов излучения и приема, а, следовательно, метод измерения времени запаздывания, определяется видом излучаемых колебаний. При непрерывном и квазинепрерывном излучении радиоволн для измерения времени запаздывания, а следовательно, дальности до цели, применяют частотную модуляцию зондирующего сигнала и соответственно этому – частотный метод измерения дальности.
Частотный метод измерения дальности основан на измерении приращения (степени изменения) несущей частоты, генерируемой передающим устройством РЛС, за время распространения сигнала до цели и обратно. Расстояние до цели при этом пропорционально разности частот отраженного и прямого сигналов.
В РЛС непрерывного (квазинепрерывного) генерирования находят применение три вида частотной модуляции несущей частоты: несимметричная пилообразная, симметричная пилообразная и синусоидальная (рис. 2.1), характеризующихся девиацией частоты  и периодом модуляции Тм, при этом величина девиации составляет десятые доли процента от несущей частоты, т.е. единицы мегагерц.
и периодом модуляции Тм, при этом величина девиации составляет десятые доли процента от несущей частоты, т.е. единицы мегагерц.
| Рис. 2.1. Виды частотной модуляции |
| t |

|
|
|
|
|

|
Рассмотрим принцип измерения дальности до неподвижной цели частотным методом на примере излучения непрерывных колебаний при несимметричной частотной модуляции (рис. 2.2). По этому закону частотный модулятор управляет несущей частотой, генерируемой передатчиком РЛС.
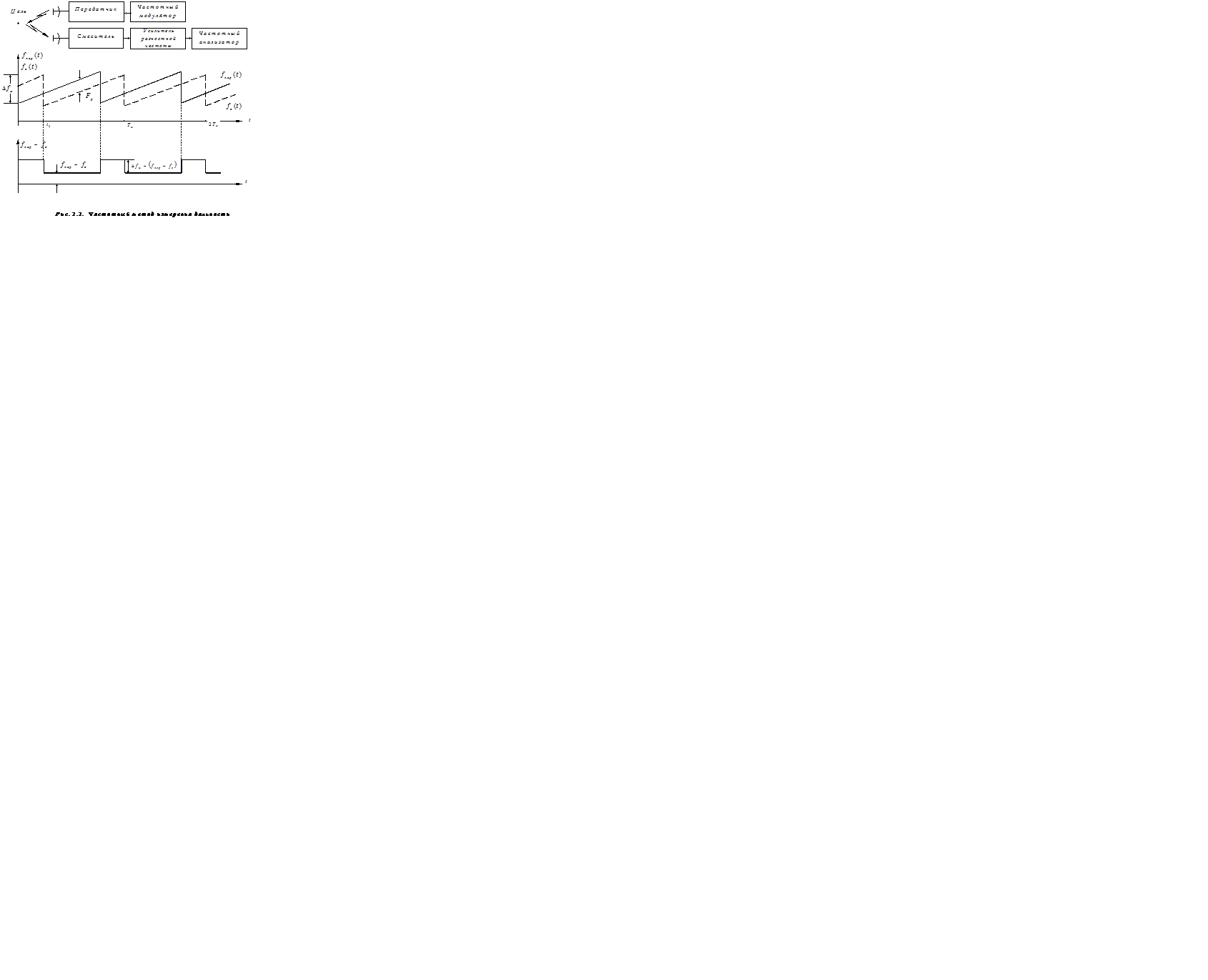
За время запаздывания t3 частота передатчика fпер изменяется и отличается от частоты отраженного сигнала fс. Разностная частота
является функцией скорости изменения несущей частоты передатчика  и времени запаздывания
и времени запаздывания  , т.е.
, т.е.
Так как  , где Fм – частота модуляции, то
, где Fм – частота модуляции, то
 (2.2)
(2.2)
Таким образом, измерение дальности до цели сводится к измерению разностной частоты Fр. Разностная частота образуется в смесителе, куда поступает ослабленный сигнал из передатчика и отраженный сигнал из антенны, и выделяется усилителем. Разностная частота, являющаяся функцией дальности до неподвижной цели, называется дальностной или дальномерной частотой. Измерение этой частоты выполняется путем последовательного или параллельного спектрального анализа.
Последовательный частотный анализатор представляет собой узкополосный фильтр, перестраиваемый по частоте в пределах от  до
до  . В процессе перестройки он в течение некоторого небольшого интервала времени будет настроен на разностную частоту Fр и на его выходе появится сигнал, который позволит произвести отсчет величины Fр, а следовательно, измерение дальности до цели. Недостатками последовательного анализатора являются неполное использование энергии отраженного сигнала, большое время обзора контролируемой области пространства и невозможность одновременного измерения дальности до нескольких целей.
. В процессе перестройки он в течение некоторого небольшого интервала времени будет настроен на разностную частоту Fр и на его выходе появится сигнал, который позволит произвести отсчет величины Fр, а следовательно, измерение дальности до цели. Недостатками последовательного анализатора являются неполное использование энергии отраженного сигнала, большое время обзора контролируемой области пространства и невозможность одновременного измерения дальности до нескольких целей.
Параллельный частотный анализатор представляет собой совокупность (набор) достаточно большого числа узкополосных фильтров, амплитудно-частотные характеристики которых перекрывают весь диапазон измеряемых частот – . Появление сигнала на выходе того или иного фильтра позволяет судить о дальности до цели. При этом можно одновременно измерять дальность до нескольких целей. Точность измерения дальности и разрешающая способность по дальности определяется шириной полосы пропускания фильтра.
Вместе с тем, чем меньше ширина полосы, тем больше должна быть длительность сигнала на входе фильтра, т.е. тем большим должно быть время облучения цели. В общем случае число фильтров оказывается достаточно большим, что вызывает сложность анализатора.
При непрерывном излучении радиоволн в составе РЛС должно быть две антенны – передающая и приемная, что существенно ограничивает возможность размещения таких станций на объектах. Для обеспечения возможности использования одной антенны, как на передачу, так и на прием, применяют квазинепрерывный режим излучения. На время излучения приемное устройство запирается, а прием отраженных сигналов осуществляется во время пауз.
ВТОРОЙ УЧЕБНЫЙ ВОПРОС: Принцип измерения дальности импульсным методом.
Измерение дальности импульсным методом возможно в РЛС, использующих одну антенну на приём и передачу и сводится к фиксации моментов излучения зондирующего сигнала, приема отраженного сигнала и измерению временного интервала между этими моментами.
Импульсный передатчик (рис. 2.4) генерирует радиоимпульс длительностью τи, который через антенный переключатель попадает в антенну и излучается. На время излучения приемник отключается от антенны. В паузах между зондирующими импульсами отраженные сигналы, воспринимаемые антенной, через тот же антенный переключатель поступают в приемник. Время запаздывания t3 отраженного сигнала относительно прямого измеряется с помощью оконечного устройства, в качестве которого используются визуальные индикаторы на электронно-лучевых трубках или цифровые схемы.
| Цель |
| D |
| Передающее устройство |
| Приемное устройство |
| Оконечное устройство |
| Антенный переключатель |
Рассмотрим принцип измерения времени запаздывания с помощью индикатора с линейной разверткой.
Момент начала развертки соответствует моменту излучения зондирующего импульса, а период следования импульсов выбирается с учетом обратного хода развертки, т.е. несколько больше двойного времени прохождения импульса от РЛС до максимальной дальности, соответствующей установленному масштабу (шкале). Следовательно, минимальное значение периода следования импульсов должно быть выбрано из условия 2Дшк
 (2.4)
(2.4)
где κз=1,2...1,5 - коэффициент запаса, учитывающий обратный ход развертки
Таким образом, каждой точке развертки соответствует определенное время запаздывания отраженного импульса, а следовательно, определенная дальность до цели.
| t |
| t3 |

|
| Tи |
| Рис. 2.4. Импульсный метод измерения дальности |
| t |
| D |
| Dшк |
| Up |
Напряжение развёртки при этом поступает на горизонтальные пластины ЭЛТ, а отраженные от цели импульсы с выхода приемника - на вертикальную пару пластин ЭЛТ. Они вызывают вертикальную отметку – приблизительно пропорциональную амплитуде сигнала.
Периодическая развертка луча представляет собой линейную шкалу времени, которая градуируется в единицах дальности. Такая развертка именуется временной или разверткой дальности. Расстояние вдоль линии развертки измеряется с помощью специального механического или электронного визира (маркера), совмещаемого с передним фронтом отраженного импульса. В зоне обнаружения РЛС может находиться несколько целей и каждая из них будет создавать свою отметку в точке развертки, соответствующей удалению цели от РЛС.
В каждой РЛС, как правило, предусматривается возможность работы при различных масштабах дальности. Так, в РЛС ОБНО в различных условиях функционирования могут быть использованы, например, шкалы дальности 1,2,4,8,16,32, и 64 морских мили, а в РЛС ОВЦ 16,32,64,128,256 и 512 км. При использовании одной и той же ЭЛТ уменьшение шкалы (укрупнение масштаба) достигается соответствующим увеличением скорости изменения развертывающего напряжения Uр (повышением крутизны «пилы»), вызывающим увеличение скорости развертки светового пятна. Укрупнение масштаба дальности (уменьшение шкалы) создает более благоприятные условия наблюдения близкорасположенных целей и создает принципиальную возможность увеличения частоты следования импульсов, а следовательно, увеличение числа отраженных импульсов в течение времени облучения цели, что повышает энергетические возможности РЛС. Такая возможность может быть реализована лишь в случаях, когда передающее устройство допускает уменьшение скважности  или при соответствующем уменьшении длительности импульса, обеспечивающем неизменность скважности.
или при соответствующем уменьшении длительности импульса, обеспечивающем неизменность скважности.
ТРЕТИЙ УЧЕБНЫЙ ВОПРОС: Условия однозначности измерения дальности.
Очевидно, что дальность измеряется однозначно лишь в тех случаях, когда максимальное время запаздывания сигнала, отраженного от цели, находящейся на дальности Д = Дшк, меньше периода следования импульсов. Таким образом условие однозначности измерения дальности имеет вид:
 . (2.5)
. (2.5)
Если же это неравенство не выполняется, то отраженные импульсы всех целей, характеризующихся временем запаздывания
 ,
,
где tз < Tи, а k = 1,2,3..., будут расположены в одной и той же точке развертки дальности.
Допустим, в зоне обзора РЛС находится цель на расстоянии Д от РЛС. Истинное время запаздывания отраженного сигнала составляет  .
.
Если в РЛС установлена шкала дальности, соответствующая периоду следования  , и излучается последовательность зондирующих импульсов, то дальность будет измеряться однозначно, т.е.
, и излучается последовательность зондирующих импульсов, то дальность будет измеряться однозначно, т.е.  .
.
|
| t |
|
|
Если же в РЛС установлена шкала, соответствующая периоду повторения  (в), то расстояние будет измерено неправильно (
(в), то расстояние будет измерено неправильно (  ), так как цель будет наблюдаться на втором ходу развертки.
), так как цель будет наблюдаться на втором ходу развертки.
| t |
|
|
В большинстве случаев опытный оператор сравнительно легко выявляет это несоответствие. В сомнительных случаях переходят на другую шкалу, используя больший период следования импульсов  . Если же переход на большую шкалу нежелателен, то используют изменение межимпульсных интервалов (ИМИ) от импульса к импульсу, т.е. вобуляцию частоты следования импульсов Fи.
. Если же переход на большую шкалу нежелателен, то используют изменение межимпульсных интервалов (ИМИ) от импульса к импульсу, т.е. вобуляцию частоты следования импульсов Fи.
| Рис. 2.6. Неоднозначность измерения дальности и способы ее устранения |

|

|

|

|

|
| t |
|
|
|
|

|
|
|

|

|
|
|

Как видно из временной диаграммы (рис. 2.6 г), цели №1 соответствует время запаздывания, удовлетворяющее условию однозначности (  ). Цель №2 характеризуется временем запаздывания
). Цель №2 характеризуется временем запаздывания  .
.
При вобуляции частоты следования импульсов сигнал, отраженный от цели №1, находится в одной и той же точке развертки с запаздыванием  относительно начала развертки независимо от изменения периода следования импульсов (рис. 2.6 д). Сигнал, отраженный от второй цели, при ИМИ будет смещаться относительно начальной точки отсчета, что и является признаком неоднозначности измерения дальности.
относительно начала развертки независимо от изменения периода следования импульсов (рис. 2.6 д). Сигнал, отраженный от второй цели, при ИМИ будет смещаться относительно начальной точки отсчета, что и является признаком неоднозначности измерения дальности.
ЧЕТВЁРТЫЙ УЧЕБНЫЙ ВОПРОС: Минимальная дальность действия РЛС.
При использовании в РЛС импульсных или квазинепрерывных колебаний одна и та же антенна используется как для излучения зондирующих, так и для приема отраженных сигналов. С этой целью в составе РЛС предусматривается антенный переключатель, состоящий из ферритового коммутатора и разрядников защиты приемника (рис. 2.7). В течение длительности зондирующего импульса ферритовый коммутатор подключает выход передатчика к антенне и запирает вход приемника, а в паузы между импульсами подключает антенну к каналу приема отраженных сигналов.
| Рис. 2.7. Структурная схема антенного переключателя |
| Нагрузка |
| от ПДУ |
| к ПРУ |
| к АУ |
Один или несколько последовательно подключенных газовых разрядников, входящих в состав переключателя, поджигаются передним фронтом импульса передатчика и тем самым вносят дополнительное затухание, предохраняя входные цепи приемника от мощности, просачивающейся на выход ферритового коммутатора. Суммарное затухание, вносимое ферритовым коммутатором и искровыми промежутками газовых разрядников, настолько «загрубляют» чувствительность приемника, что отраженные от цели сигналы, поступающие в период излучения зондирующего импульса, т.е. сигналы от целей с дальностей 
не могут быть обнаружены (рис. 2.8). Так, при длительности импульса передатчика  величина
величина  .
.
После излучения зондирующего импульса ферритовый коммутатор открывает канал прохождения отраженных сигналов из антенного в приемное устройство, а в газовых разрядниках начинается процесс деионизации. При этом затухание, вносимое разрядниками в канал приема отраженных сигналов, постепенно уменьшается, т.е. постепенно восстанавливается предельная чувствительность приемника.
При использовании коротких импульсов (  ) отсчёт дальности начинается с момента начала зондирующего импульса, а время восстановления чувствительности приемника tв, как правило, соразмеримо с длительностью импульсов передатчика. Следовательно, минимальную дальность РЛС нужно рассчитывать с учётом и длительности зондирующего импульса и времени восстановления разрядника защиты приёмника.
) отсчёт дальности начинается с момента начала зондирующего импульса, а время восстановления чувствительности приемника tв, как правило, соразмеримо с длительностью импульсов передатчика. Следовательно, минимальную дальность РЛС нужно рассчитывать с учётом и длительности зондирующего импульса и времени восстановления разрядника защиты приёмника.
 (2.7)
(2.7)
| tи |
| tв |
| Рис. 2.8. Восстановление чувствительности приемника |

|
|
| Затухание, вносимое ферритовым циркулятором (коммутатором) |
| затухание, вносимое разрядником |
При использовании сложных сигналов длительностью десятки и сотни мкс или при квазинепрерывном излучении отсчет дальности начинается с момента начала сжатого при обработке импульса. Так как длительность сжатого импульса во много раз меньше длительности зондирующего, можно считать, что отсчёт дальности начинается после окончания зондирующего импульса. Очевидно, что в этом случае расчёт минимальной дальности действия можно производить только с учётом времени восстановления чувствительности разрядников защиты приемника.
 (2.9)
(2.9)
Поскольку в течение этого времени чувствительность приемника восстанавливается постепенно, то величина минимальной дальности носит условный характер, в том смысле, что при большой ЭПР близкорасположенной цели мощность отраженного сигнала может оказаться достаточной для его обнаружения даже до полного окончания процесса деионизации; в то время как в этих же условиях малоразмерная цель может не наблюдаться.
Таким образом, величина минимальной дальности действия РЛС в какой-то степени зависит от ЭПР цели; чем меньше ЭПР цели, тем меньше должны быть энергетические потери, вносимые разрядником, и, следовательно, тем больше величина Дмин.
Кроме того, ближняя зона действия РЛС характеризуется существенным влиянием мешающих отражений от взволнованной морской поверхности. Мощность помех тем больше, чем ближе к РЛС облучаемый участок поверхности и чем больше волнение моря. Можно полагать, что влияние помех от ВМП эквивалентно ухудшению чувствительности приёмника. Следовательно, с увеличением волнения моря минимальная дальность действия РЛС увеличивается.
На величину минимальной дальности действия РЛС оказывает также влияние так называемая мертвая зона станции, зависящая от высоты установки антенны На и ширины ДНА в вертикальной плоскости  . Как следует из рис. величина мертвой зоны равна
. Как следует из рис. величина мертвой зоны равна
 (2.10)
(2.10)
|
|
| Рис. 2.9. Мертвая зона РЛС |
| На |
| Антенна РЛС |
| Dмз |
Как правило для корабельных условий  Однако, в некоторых условиях размещения и функционирования РЛС ОБНО именно мертвая зона определяет минимальную дальность действия РЛС.
Однако, в некоторых условиях размещения и функционирования РЛС ОБНО именно мертвая зона определяет минимальную дальность действия РЛС.
| <== предыдущая лекция | | | следующая лекция ==> |
| Однолучевой обзор с развёртыванием ДНА в одной плоскости. | | | Историческая справка по развитию корабельных РЛС ОВНЦ. |
Дата добавления: 2016-01-07; просмотров: 4862;