Конструкции сканирующих элементов зондовых микроскопов
Согласно вышеизложенному, для работы зондовых микроскопов необходимо контролировать рабочее расстояние в системе «зонд-образец» и осуществлять перемещения зонда в плоскости образца с высокой точностью (на уровне долей ангстрема). Эта задача решается с помощью специальных манипуляторов - сканирующих элементов (сканеров). Сканирующие элементы зондовых микроскопов изготавливаются из пьезоэлектриков – материалов, обладающих пьезоэлектрическими свойствами.
Пьезоэлектрики изменяют свои размеры во внешнем электрическом поле. Уравнение обратного пьезоэффекта для кристаллов можно представить в виде:

| (1) | |
| где | uij – тензор деформаций; | |
| Ek – компоненты электрического поля; | ||
| Dijk – компоненты тензора пьезоэлектрических коэффициентов. |
Вид тензора пьезоэлектрических коэффициентов определяется типом симметрии кристаллов пьезоэффекта.
В различных технических приложениях широкое распространение получили преобразователи из пьезокерамических материалов. Пьезокерамика представляет собой поляризованный поликристаллический материал, получаемый методами спекания порошков из кристаллических сегнетоэлектриков. Вид тензора пьезоэлектрических констант для пьезокерамик существенно упрощается, поскольку отличными от нуля являются только три компоненты тензора пьезоэлектрических коэффициентов- d33, d31, d15, характеризующие продольные, поперечные (по отношению к вектору поляризации) и сдвиговые деформации.
Рассмотрим плоскую пластину из пьзокерамики (рис. 2, помещенную во внешнее электрическое поле. Пусть вектор поляризации P и вектор электрического поля E направлены вдоль оси X. Тогда, обозначая  и
и  , получаем, что деформации пьезокерамики в направлении, параллельном полю, равна
, получаем, что деформации пьезокерамики в направлении, параллельном полю, равна  , а в перпендикулярном полю направлении
, а в перпендикулярном полю направлении  .
.
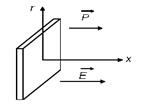
Рис. 2. Пластина из пьезокерамики во внешнем электрическом поле
В сканирующей зондовой микроскопии широкое распространение получили пьзоэлементы трубчатого типа (рис. 3). Они позволяют получать достаточно большие перемещения объектов при относительно небольших управляющих напряжениях. Трубчатые пьезоэлементы представляют собой полые тонкостенные цилиндры, изготовленные из пьезокерамических материалов. Обычно электроды в виде тонких слоев металла наносятся на внешнюю и внутреннюю поверхности трубки, а торцы трубки остаются непокрытыми.

Рис. 3. Трубчатый пьезоэлемент
Под действием разности потенциалов между внутренним и внешним электродами трубка изменяет свои продольные размеры. В этом случае продольная деформация под действием радиального электрического поля может быть записана в виде:
| (2) | |
| где | l0 – длина трубки в недеформированном состоянии. |
Абсолютное удлинение пьзоэлемента трубчатого типа равно:
| (3) | |
| где | h – толщина стенки пьзоэлемента трубчатого типа; | |
| V – разность потенциалов между внутренним и внешним электродами. |
Таким образом, при одном и том же напряжении V удлинение трубки будет тем больше, чем больше ее длина и чем меньше толщина ее стенки.
Соединение трех трубок в один узел (рис. 4) позволяет организовать прецизионные перемещения зонда микроскопа в трех взаимно перпендикулярных направлениях. Такой сканирующий элемент называется триподом.

Рис. 4. Трех координатный сканирующий элемент в виде трипода
Недостатками такого сканера являются сложность изготовления и сильная асимметрия конструкции. На сегодняшний день в сканирующей зондовой микроскопии наиболее широко используются сканеры, изготовленные на основе одного трубчатого элемента. Общий вид трубчатого сканера и схема расположения электродов представлены на рис. 5. Материал трубки имеет радиальное направление вектора поляризации.
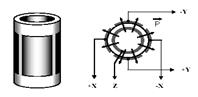
Рис. 5. Конструкция комбинированного трубчатого пьезосканера
Внутренний электрод обычно сплошной. Внешний электрод сканера разделен по образующим цилиндра на четыре секции. При подаче противофазных напряжений на противоположные секции внешнего электрода (относительно внутреннего) происходит сокращение участка трубки в том месте, где направление поля совпадает с направлением поляризации, и удлинение там, где они направлены в противоположные стороны. Это приводит к изгибу трубки в соответствующем направлении. Таким образом осуществляется сканирование в плоскости X,Y. Изменение потенциала внутреннего электрода относительно всех внешних секций приводит к удлинению или сокращению трубки по оси Z. Таким образом, можно реализовать трех координатный сканер на базе одной пьезотрубки. Реальные сканирующие элементы имеют часто более сложную конструкцию, однако принципы их работы остаются теми же самыми.
Широкое распространение получили также сканеры на основе биморфных пьзоэлементов. Биморф представляет собой две пластины пьезоэлектрика, склеенные между собой таким образом, что вектора поляризации в каждой из них направлены в противоположные стороны (рис. 6). Если подать напряжение на электроды биморфа, как показано на рис. 6, то одна из пластин будет расширяться, а другая сжиматься, что приведет к изгибу всего элемента. В реальных конструкциях биморфных элементов создается разность потенциалов между внутренним общим и внешними электродами таким образом, чтобы в одном элементе поле совпадало с направлением вектора поляризации, а в другом было направлено противоположно.
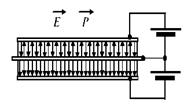
Рис. 6. Устройство биморфного пьезоэлемента
Изгиб биморфа под действием электрических полей положен в основу работы биморфных пьезосканеров. Объединяя три биморфных элемента в одной конструкции, можно реализовать трипод на биморфных элементах. Если внешние электроды биморфного элемента разделить на четыре сектора, то можно организовать движение зонда по оси Z и в плоскости X,Y на одном биморфном элементе (рис. 7).
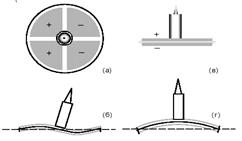
Рис. 7. Схематическое изображение работы биморфного пьезосканера
Действительно, подавая противофазные напряжения на противоположные пары секций внешних электродов, можно изгибать биморф так, что зонд будет двигаться в плоскости X,Y (рис. 7 (а, б)). А изменяя потенциал внутреннего электрода относительно всех секций внешних электродов, можно прогибать биморф, перемещая зонд в направлении Z (рис. 7 (в, г)).
Несмотря на ряд технологических преимуществ перед кристаллами, пьезокерамики обладают некоторыми недостатками, отрицательно влияющими на работу сканирующих элементов. Одним из таких недостатков является нелинейность пьезоэлектрических свойств. В общем случае (особенно при больших управляющих полях) пьезокерамики характеризуются нелинейной зависимостью деформации от поля (или от управляющего напряжения). Таким образом, деформация пьезокерамики является сложной функцией внешнего электрического поля . Типичные значения полей E*, при которых начинают сказываться нелинейные эффекты, составляют порядка 100 В/мм. Поэтому для корректной работы сканирующих элементов обычно используются управляющие поля в области линейности керамики (E < E*).
Другим недостатком пьезокерамики является так называемый крип (creep - ползучесть) – запаздывание реакции на изменение величины управляющего электрического поля. Крип приводит к тому, что в СЗМ изображениях наблюдаются геометрические искажения, связанные с этим эффектом. Особенно сильно крип сказывается при выводе сканера в заданную точку для проведения локальных измерений и на начальных этапах процесса сканирования. Для уменьшения влияния крипа керамики применяются временные задержки в указанных процессах, позволяющие частично скомпенсировать запаздывание сканера.
Еще одним недостатком пьезокерамик является неоднозначность зависимости удлинения от направления изменения электрического поля (гистерезис). Это приводит к тому, что при одних и тех же управляющих напряжениях пьезокерамика оказывается в различных точках траектории в зависимости от направления движения. Для исключения искажений СЗМ изображений, обусловленных гистерезисом пьезокерамики, регистрацию информации при сканировании образцов производят только на одной из ветвей зависимости.
3. Задание:
1. Ознакомиться с общими принципами работы сканирующих зондовых микроскопов;
2. Изучить теоретические основы пьезоэлектрических сканеров микроперемещений объектов наблюдения;
3. Определить передаточную функцию (оптико-механическую) лабораторного стенда для определения электромеханических параметров пьезосканеров;
4. Определить экспериментальным путем электромеханические параметры однокоординатного пьезосканера;
5. Построить зависимость деформации пьезокерамики от величины напряженности электрического поля;
6. Представить развернутое теоретическое обоснование полученных экспериментальных данных;
7. Подготовить технический отчет по результатам проведенной лабораторной работы.
Дата добавления: 2016-01-03; просмотров: 1121;