Структурные схемы объекта регулирования
xв (z)
| Wв ( p) | |||||||
| xв (u) | Wp ( p) | y | |||||


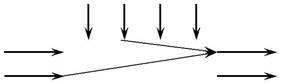
Рис. 1.1.Структурная схема объекта регулирования.
Один из этапов проектирования систем регулирования технологиче-ских процессов – выбор структуры системы и расчет оптимальных пара-метров регуляторов. И структура сис-темы, и параметры регуляторов опре-деляются свойствами технологическо-
го процесса как объекта регулирования.
Любой технологический процесс как объект регулирования (рис. 1.1) характеризуется следующими основными группами переменных:
1. Переменные, характеризующие состояние процесса (совокупность их будем обозначать вектором y). Эти переменные в процессе регулирования необходимо поддерживать на заданном уровне или изменять по заданному закону. Точность стабилизации перемен-ных состояния может быть различной, в зависимости от требований, диктуемых техно-логией, и возможностей системы регулирования. Как правило, переменные, входящие в вектор y, измеряют непосредственно, но иногда их можно вычислить, используя мо-дель объекта по другим непосредственно измеряемым переменным. Вектор y часто на-зывают вектором регулируемых величин.
2. Переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Совокупность этих переменных обозначают вектором xp (или u) регулирующих воздействий. Обычно регулирующими воздействиями служат изменения расходов материальных потоков или потоков энергии.
3. Переменные, изменения которых не связаны с воздействием системы регулирования. Эти изменения отражают влияние на регулируемый объект внешних условий, измене-
ния характеристик самого объекта и т. п. Их называют возмущающими воздействиями и обозначают вектором xв или z. Вектор возмущающих воздействий, в свою очередь, можно разбить на две составляющие – первую можно измерить, а вторую – нельзя. Возможность измерения возмущающего воздействия позволяет ввести в систему регу-лирования дополнительный сигнал, что улучшает возможности системы регулирова-
ния.
Например, для изотермического химического реактора непрерывного действия, регу-лируемыми переменными являются температура реакционной смеси, состав потока на выходе из аппарата; регулирующими воздействиями могут быть изменение расхода пара в рубашку реактора, изменение расхода катализатора и расхода реакционной смеси; возмущающими воз-действиями являются изменения состава сырья, давления греющего пара, причем если давле-
ние греющего пара нетрудно измерить, то состав сырья во многих случаях может быть изме-рен с низкой точностью или недостаточно оперативно.
Анализ технологического процесса как объекта автоматического регулирования пред-полагает оценку его статических и динамических свойств по каждому из каналов от любого возможного управляющего воздействия к любому возможному регулируемому параметру, а также оценку аналогичных характеристик по каналам связи регулируемых переменных с со-ставляющими вектора возмущений. В ходе такого анализа необходимо выбрать структуру системы регулирования, т. е. решить, с использованием какого регулирующего воздействия следует управлять тем или иным параметром состояния. В результате во многих случаях (от-нюдь не всегда) удается выделить контуры регулирования для каждой из регулируемых вели-чин, т. е. получить совокупность одноконтурных систем регулирования.
Важным элементом синтеза АСР технологического процесса является расчет однокон-турной системы регулирования. При этом требуется выбрать структуру и найти числовые зна-чения параметров регуляторов. Как правило, используют следующие типовые структуры ре-гулирующих устройств (типовые законы регулирования): пропорциональный (П) регулятор (R(p) = -S1); интегральный (И) регулятор (R(p) = -S0/p); пропорционально-интегральный (ПИ) закон регулирования (R(p) = -S1 – S0/p) и, наконец, пропорционально-интегрально-дифференциальный (ПИД) закон (R(p) = -S1 – S0/p – S2·p). При расчете системы проверяют возможность использования наиболее простого закона регулирования, каждый раз оценивая качество регулирования, и если оно не удовлетворяет требованиям, переходят к более слож-ным законам или используют так называемые схемные методы улучшения качества.
В теории автоматического регулирования разработаны различные методы расчета АСР при заданных критериях качества, а также методы оценки качества переходных процессов при заданных параметрах объекта и регулятора. При этом наряду с точными методами, требую-щими больших затрат времени и ручного труда, разработаны приближенные методы, позво-ляющие сравнительно быстро оценить рабочие параметры регулятора или качество переход-ных процессов (метод Циглера–Никольса для расчета настроек регуляторов; приближенные формулы для оценки интегрального квадратичного критерия и т. п.).
Широкое внедрение вычислительной техники для проектирования систем управления (СУ) и реализации самонастраивающихся СУ практически сняло ограничения, связанные с трудоемкостью методов расчета АСР. В настоящее время создаются пакеты прикладных про-грамм для расчета АСР, позволяющие использовать алгоритмы, основанные на точных мето-дах. При этом приближенные методы обычно применяют для выбора начальных значений пе-ременных в итеративных методах расчета сложных систем регулирования или на начальной стадии проектной разработки системы автоматизации сложных технологических объектов.
Дата добавления: 2015-11-06; просмотров: 1705;