Информационно-измерительная система. Датчики. Вторичные приборы. Линии связи.
Технические средства автоматизации в системах управления.
Любая система управления должна выполнять следующие функции:
· сбор информации о текущем состоянии технологического объекта управления (ТОУ);
· определение критериев качества работы ТОУ;
· нахождение оптимального режима функционирования ТОУ и оптимальных управляющих воздействий, обеспечивающих экстремум критериев качества;
· реализация найденного оптимального режима на ТОУ.
Эти функции могут выполняться обслуживающим персоналом или ТСА. Различают четыре типа систем управления (СУ):
1) информационные;
2) автоматического управления;
3) централизованного контроля и регулирования;
4) автоматизированные системы управления технологическими процессами.
Информационные (неавтоматизированные) системы управления (рисунок 1) применяются редко, только для надежно функционирующих, простых технологических объектов управления ТОУ.
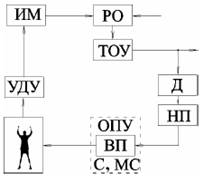
Рисунок 1 - Структура информационной системы управления:
Д - датчик (первичный измерительный преобразователь); НП – нормирующий преобразователь; ВП - вторичный показывающий прибор; ОПУ- операторский пункт управления (щиты, пульты, мнемосхемы, устройства сигнализации); УДУ – устройства дистанционного управления (кнопки, ключи, байпасные панели управления и др.); ИМ – исполнительный механизм; РО - регулирующий орган; С - устройства сигнализации; МС – мнемосхемы.
В некоторых случаях в состав информационной СУ входят регуляторы прямого действия и встроенные в технологическое оборудование регуляторы.
В системах автоматического управления (рисунок 2) все функции выполняются автоматически при помощи соответствующих технических средств.
Функции оператора включают в себя:
· техническую диагностику состояния САУ и восстановление отказавших элементов системы;
· коррекцию законов регулирования;
· изменение задания;
· переход на ручное управление;
· техническое обслуживание оборудования.
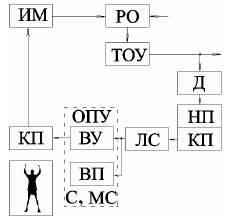
Рисунок 2 - Структура системы автоматического управления (САУ):
КП - кодирующий преобразователь; ЛС - линии связи (провода, импульсные трубки); ВУ - вычислительные устройства
Системы централизованного контроля и регулирования (СЦКР) (рисунок 3). САУ применяются для простых ТОУ, режимы функционирования которых характеризуются небольшим числом координат, а качество работы одним легко вычисляемым критерием. Частным случаем САУ является автоматическая система регулирования (АСР).
Система управления, автоматически поддерживающая экстремальное значение ТОУ, относится к классу систем экстремального регулирования.
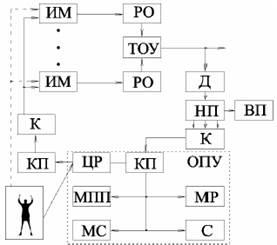
Рисунок 3 - Структура системы централизованного контроля и регулирования:
ОПУ - операторский пункт управления; Д - датчик; НП – нормирующий преобразователь; КП - кодирующие и декодирующие преобразователи; ЦР - центральные регуляторы; МР – многоканальное средство регистрации (печать); С - устройство сигнализации предаварийного режима; МПП - многоканальные показывающие приборы (дисплеи); МС - мнемосхема; ИМ - исполнительный механизм; РО - регулирующий орган; К – контроллер.
АСР, поддерживающие заданное значение выходной регулируемой координаты ТОУ, подразделяются на:
· стабилизирующие;
· программные;
· следящие;
· адаптивные.
Экстремальные регуляторы применяются крайне редко.
Технические структуры СЦКР могут быть двух типов:
1) с индивидуальными ТСА;
2) с коллективными ТСА.
В системе первого типа каждый канал конструируют из ТСА индивидуального пользования. К ним относятся датчики, нормирующие преобразователи, регуляторы, вторичные приборы, исполнительные механизмы, регулирующие органы.
Выход из строя одного канала регулирования не приводит к остановке технологического объекта.
Такое построение увеличивает стоимость системы, но повышает ее надежность.
Система второго типа состоит из ТСА индивидуального и коллективного пользования. К ТСА коллективного пользования относят: коммутатор, КП (кодирующие и декодирующие преобразователи), ЦР (центральные регуляторы), МР (многоканальное средство регистрации (печать)), МПП (многоканальные показывающие приборы (дисплеи)).
Стоимость коллективной системы несколько ниже, но надежность в сильной степени зависит от надежности коллективных ТСА.
При значительной длине линии связи применяют индивидуальные кодирующие и декодирующие преобразователи, размещенные около датчиков и исполнительных механизмов. Это повышает стоимость системы, но улучшает помехозащищенность линии связи.
Автоматизированные системы управления технологическими процессами (АСУТП) (рисунок 4) - это машинная система, в которой ТСА осуществляют получение информации о состоянии объектов, вычисляют критерии качества, находят оптимальные настройки управления. Функции оператора сводятся к анализу полученной информации и реализации с помощью локальных АСР или дистанционного управления РО.
Различают следующие типы АСУТП:
централизованная АСУ ТП (все функции обработки информации и управления выполняет одна управляющая вычислительная машина УВМ) (рисунок 4);
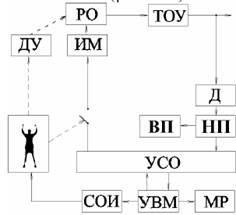
Рисунок 4 - Структура централизованной АСУ ТП:
УСО - устройство связи с объектом; ДУ - дистанционное управление; СОИ - средство отображения информации
супервизорная АСУТП (имеет ряд локальных АСР, построенных на базе ТСА индивидуального пользования и центральной УВМ (ЦУВМ), имеющей информационную линию связи с локальными системами) (рисунок 5);
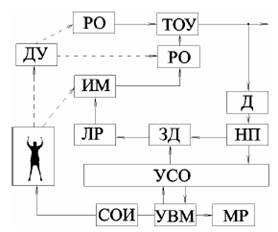
Рисунок 5 - Структура супервизорной АСУТП: ЛР - локальные регуляторы
распределенная АСУТП - характеризуется разделением функций контроля обработки информации и управления между несколькими территориально распределенными объектами и вычислительными машинами.
В общем случае типовые средства автоматизации могут быть техническими, аппаратными, программно-техническими и общесистемными.
К техническим средствам автоматизации (ТСА) относят:
· датчики;
· исполнительные механизмы;
· регулирующие органы (РО);
· линии связи;
· вторичные приборы (показывающие и регистрирующие);
· устройства аналогового и цифрового регулирования;
· программно-задающие блоки;
· устройства логико-командного управления;
· модули сбора и первичной обработки данных и контроля состояния технологического объекта управления (ТОУ);
· модули гальванической развязки и нормализации сигналов;
· преобразователи сигналов из одной формы в другую;
· модули представления данных, индикации, регистрации и выработки сигналов управления;
· буферные запоминающие устройства;
· программируемые таймеры;
· специализированные вычислительные устройства, устройства допроцессорной подготовки.
К программно-техническим средствам автоматизации относят:
· аналого-цифровые и цифро-аналоговые преобразователи;
· управляющие средства;
· блоки многоконтурного аналогового и аналого-цифрового регулирования;
· устройства многосвязного программного логического управления;
· программируемые микроконтроллеры;
· локально-вычислительные сети.
К общесистемным средствам автоматизации относят:
· устройства сопряжения и адаптеры связи;
· блоки общей памяти;
· магистрали (шины);
· устройства общесистемной диагностики;
· процессоры прямого доступа для накопления информации;
· пульты оператора.
Надежная и эффективная работа систем автоматизации в первую очередь определяется достоверностью получаемой об объекте управления информации. Получение в АСУТП точной, своевременной, полной и удобной для использования информации обеспечивается измерительной информационной системой (ИИС). ИИС представляет собой совокупность технических средств, объединенных общим алгоритмом функционирования и предназначенных для, автоматического (автоматизированного) получения, сбора, преобразования информации и представления ее для непосредственного восприятия человеком или техническими средствами с целью формирования управляющих сигналов.
На рисунке 6 показана обобщенная функциональная схема канала измерительной информационной системы. От источника информации ИИ сигнал последовательно проходит первичный измерительный преобразователь ПИП, вторичный измерительный преобразователь ВИП, измерительное устройство ИУ, устройство представления информации УПИ и поступает к потребителю информации ПИ. По необходимости устройства канала получают питание от различных видов источников энергии ИЭ и в сложных каналах передают и получают сигналы от устройств управления и вспомогательных устройств УУ и В. Согласованная и надежная работа устройств этого канала невозможна без устройств управления и вспомогательных устройств, в которые могут входить вычислительные устройства, устройства памяти, исполнительные устройства и т. п. В конкретных каналах ряд устройств может отсутствовать.
Если функциональная схема канала ИИС состоит из ИИ+ПИП+ВИП+ИУ+ПИ, то по общепринятой классификации это система автоматического измерения САИ или система автоматического контроля САК. Если функциональная схема канала ИИС состоит из ИИ+ПИП+ВИП+УПИ+ИУ+ПИ, то по общепринятой классификации это система автоматического сигнализации САС или система автоматического контроля САК. Если функциональная схема канала ИИС передает и принимает сигнал от устройств формирования команд УФК, то по общепринятой классификации это система автоматического управления или регулирования САУ или САР.
Рисунок 6 - Обобщенная функциональная схема канала измерительной информационной системы
Источники информации ИИ, или объекты измерения очень разнообразны. Большинство объектов и процессов характеризуется множеством различных параметров, каждый из которых может быть измерен в отдельности, но в реальных условиях действует на измерительный преобразователь совместно со всеми остальными параметрами. Конкретные средства получения информации ПИП и ВИП предназначены для измерения только интересующего нас единственного параметра, называемого измеряемой величиной.
Как Вы уже знаете, техническое средство для измерения той или иной величины, включающее в себя конструктивную совокупность ряда измерительных преобразователей и размещенное непосредственно у объекта измерения, называется датчиком. В датчике могут быть как только ПИП, например, термопара, так и ПИП и ВИП, например, автоматические конвейерные весы с унифицированным выходным сигналом.
Сигнал с датчиков через линии дистанционной передачи поступает или на ВИП, или на измерительные устройства ИУ, которые расположены в более благоприятных условиях.
Устройства представления информации УПИ (табло, стрелочные указатели и т. п.) в зависимости от конкретных требований размещаются в местах потребления информации (человеком или техническим устройством), например на диспетчерском пункте или местном щите управления.
Изобразим систему автоматического управления с основными ее элементами на конкретных примерах.
Технологический процесс и оборудование, в котором оно осуществляется, называется, как правило, объектом управления (в более узком смысле иногда говорят об объекте регулирования).
Каждый объект управления имеет свой входные и выходные воздействия (параметры). Входные воздействия меняющееся случайным образом во времени, влияющие на выходные показатели, и которые в лучшем случае могут быть проконтролированы, но не оперативно изменены по нашему желанию, носят название входных возмущающих воздействий (смотри рисунок 7).
Zi

 f(t)
f(t)
 |
 Хi Yi
Хi Yi

Рисунок 7 - К описанию процессов и производств как объект управления
Входные воздействия (Хi), которые могут быть оперативно и целенаправленно изменены (человеком или техническим устройством) с целью получения заданных выходных параметров (Yi) носят название управляющих воздействий.
Выходные параметры – это параметры, с помощью которых оценивается состояние или качество ведения процесса. Это могут быть простейшие технологические показатели, характеризующие работу агрегата, ход процесса или более сложные параметры, характеризующие, например, эффективность работы оборудования, процессов или предприятия в целом.
При характеристике объектов управления выделяют также такие входные воздействия как помехи, которые надо отличать от характеристики возмущающих воздействий.
Помехами, как правило, называют группу возмущающих воздействий, которые также влияют на выходные показатели. Они не могут быть, как изменены оперативно, по нашему желанию, так и проконтролированы, мы о них можем только догадываться. К помехам или к их функциям, как правило, относят такие понятия как: старение оборудования, забивка оборудования, износ отдельных частей системы и так далее.
Таким образом, рассмотрим систему автоматического управления уровнем жидкости в емкости, в которую она (жидкость) втекает и вытекает в соответствии с требованиями потребления.
 Qвх
Qвх
 |  | ||||
 | |||||

 h Qвых
h Qвых

 | |||
 |

Рисунок 8 - Емкость с жидкостью как объект управления
Представим физический объект с жидкостью с позиции ранее нами данных определений.
|
Qвх 



 h(t)
h(t)

|
y2(t)
h1(t)
 | |||
 | |||
hтек(t)
|
|

 y1(t) cрассогл ЭС hзад(t)
y1(t) cрассогл ЭС hзад(t)

Рисунок 9 - Структурная схема системы автоматического регулирования уровня жидкости в емкости, где h, h1(t), hтек(t) – это унифицированный токовый сигнал 0-5, 4-20, 0-20мА или стандартный цифровой сигнал, cрассогл = hтек(t)- hзад(t)
В соответствии с изображенной структурной схемой системы автоматического регулирования выходная регулируемая величина h–уровень жидкости, измеряется с помощью датчика уровня.
Сигнал с датчика h1(t) поступает в измерительный прибор, который по аналогии с датчиком, называется вторичным прибором. Вторичные приборы предназначены для регистрации (записи, визуализации) информации и передачи ее на следующие устройства системы.
Информация с вторичного прибора hтек(t) поступает на элемент сравнения ЭС, куда также входит сигнал от задатчика о заданном значении hзад(t) регулируемой величины. Результат сравнения двух величин в виде сигнала рассогласования cрассогл(t)= hтек(t)-hзад(t) называемый рассогласованием (или отклонением) поступает в регулирующее устройство.
Регулирующее устройство (регулятор) предназначено для формирования управляющего (регулирующего) воздействия y по определенному закону и передачи его на исполнительный механизм ИМ, о том какие законы регулирования и какие регуляторы используются, в настоящее время в промышленности, будем рассматривать далее.
Исполнительные механизмы могут быть, как и другие элементы, в зависимости от рода используемой энергии электрическими, пневматическими, гидравлическими. Исполнительный механизм предназначен для обработки команд выработанных регулятором и воздействия на конечное звено системы регулирования – регулируемый орган.
Регулирующий орган РО предназначен для изменения количества вещества или энергии, поступающей в объект управления, до достижения заданного значения выходной (регулируемой) величины.
Остановимся кратко на алгоритме функционирования рассматриваемой системы. Итак, при колебаниях объемного расхода Qmax£ Q< Qmin предположим, что Q»Qmax, тогда уровень h начнет резко снижаться, что непременно зафиксируется датчиком, сравнится с заданным значением и результат рассогласования поступит в регулирующее устройство. Последнее выработает регулирующее воздействие, с помощью которого ИМ переместит регулирующий орган таким образом, что в емкость добавится необходимое количество жидкости, и уровень восстановится до прежнего значения. Если не принять никаких мер по управлению, то уровень снизится, что приводит к нестабильному и неравномерному снабжению потребителей жидкостью, что непрерывно зафиксируется датчиком сравнения с заданным значением и результат рассогласования поступит в регулирующее устройство.
Таким образом, работают практически все системы автоматического регулирования за исключением некоторых специальных, таких как поисковые системы экстремального управления, следящие системы и так далее.
Измерительный преобразователь (датчик) структурно может быть представлен в виде отдельных элементов: чувствительного элемента (первичного преобразователя), промежуточных преобразователей, нормирующего преобразователя (оконечного преобразователя). Структурная схема измерительного преобразователя (датчика) прямого преобразования представлена на рисунок 10.
Рисунок 10 - Структурная схема измерительного преобразователя (датчика) прямого преобразования
Часто, измерительные преобразователи состоят только из чувствительного элемента, например: термопары, термосопротивления.
Чувствительный элемент предназначен для восприятия измеряемой физической величины и передачи сигнала на последующие элементы. Как правило, выходным сигналом чувствительного элемента является естественный сигнал, пропорциональный измеряемой величине: ток, напряжение, сопротивление, емкость, мощность.
Наряду с измерительными преобразователями прямого преобразования широкое применение получили измерительные преобразователи компенсационного типа, структурная схема которого приведена на рисунке 12.
Рисунок 12 - Структурная схема измерительного преобразователя (датчика) компенсационного типа
Выходной сигнал измерительного преобразователя с помощью элемента обратной связи подается на вход элемента сравнения преобразователя, где сравнивается с текущим значением измеренной физической величины.
Промежуточные преобразователи, как правило, служат для преобразования измеренной физической величины в такую же физическую величину другого масштаба (масштабные преобразователи) или преобразуют измеренную физическую величину в другую более удобную для последующего преобразования (усиления) форму.
Нормирующий преобразователь предназначен для преобразования естественного сигнала любой природы в унифицированный сигнал тока, напряжения, частоты, давления сжатого воздуха или жидкости.
Современные измерительные преобразователи кроме функции непосредственного измерения и преобразования физической величины (технологического параметра) также могут выполнять функцию индикации с помощью цифровых дисплейных индикаторов.
Средства получения информации — измерительные преобразователи и датчики могут быть классифицированы по ряду признаков.
У каждого измерительного преобразователя датчика различают естественную входную величину, для измерения которой он предназначен. Остальные факторы, влияющие на показания средства измерения, относят к помехам. Точно так же выделяют и естественную выходную величину, имеющую наибольшую связь с естественной входной величиной.
Если измерительный преобразователь имеет одинаковые по физической природе входную и выходную величины, он называется однородным; в противном случае — неоднородным.
Среди однородных измерительных преобразователей можно выделить преобразователи электрических величин в электрические (усилители, трансформаторы, выпрямители, модуляторы и т. п.), пневматических в пневматические (усилители, модуляторы и т. п.), неэлектрических величин в неэлектрические (рычаги, редукторы, мембраны, пружины и т. п.).
Среди неоднородных измерительных преобразователей самую большую группу составляют преобразователи неэлектрических величин в электрические (термопары, тензодатчики, пьезоэлементы, индукционные датчики и т п.). По виду естественной выходной величины эти преобразователи подразделяют на две подгруппы: генераторные, имеющие выходе э. д. с., и параметрические с выходной величиной в виде изменения R, С или L.
Можно выделить преобразователи неэлектрических величин в пневматические (переменное пневмосопротивление элемент сопло-заслонка, пневмотумблер и т п.), электрических величин в неэлектрические (электромагниты, электродвигатели, электронагреватели и т. п.).
Часто название датчика определяется по наименованиям выходной и входной величин чувствительного элемента, например индуктивные датчики давления, реостатные датчики перемещения, емкостные датчики уровня.
Основные свойства датчика, как одного из элементов (конструктивно и пространстветвенно обособленного) системы автоматического управления, определяются его статическими и динамическими характеристиками.
Статическая характеристика датчика определяет функциональную зависимость выходной величины датчика у от входной х [у = f(х)] в установившемся режиме.
Статические характеристики датчиков могут быть выражены аналитически и графически.
По виду статической характеристики различают датчики с непрерывной и с релейной характеристикой. У датчиков с непрерывной характеристикой плавному постепенному изменению входной величины соответствует плавное постепенное изменение выходной величины. У датчиков с релейной характеристикой при некотором значении плавно изменяющейся входной величины происходит резкое, скачкообразное изменение выходной величины.
Если при каком-то значении входной величины датчика (обычно это значение принимается за среднее, или нулевое) происходит изменение знака выходной величины, датчик называется реверсивным, если знак выходной величины не изменяется — нереверсивным.
Если непрерывная статическая характеристика датчика имеет вид прямой линии, она называется линейной, в противном случае – нелинейной.
На рисунке 13 показаны статические характеристики наиболее распространенных датчиков.


 у у у
у у у



 у2
у2

 ∆у
∆у
∆х



 у1
у1
 х х х
х х х
 0 0 х1 х2 хотп хсраб
0 0 х1 х2 хотп хсраб
а б в

 у у
у у

 у2 ∆у
у2 ∆у



 у1 ά
у1 ά
 у0 ∆х 0
у0 ∆х 0




 х х х
х х х

 0 0 2а
0 0 2а
г д е
у у у

 |  | ||
-хсраб -хотп



 х х х
х х х
-хотп хсраб 0 хотп хсраб 0 0
 ж з и
ж з и
Рисунок 13 Статические характеристики датчиков:
а – непрерывная нереверсивная нелинейная; б — непрерывная нереверсивная линейная; в - релейная нереверсивная; г — непрерывная реверсивная нелинейная; д — непрерывная реверсивная линейная; е — нелинейная реверсивная с зонной нечувствительности 2а; ж — релейная реверсивная двухпозиционная; з — релейная реверсивная трехпозиционная; и – непрерывная реверсивная с петлей гистерезиса (с зоной нечувствительности)
Непрерывные характеристики имеют такие датчики, как термопары, термосопротивления, чувствительные элементы индуктивных датчиков, тензо-пьезодатчиков, фотодатчики и др. Теоретически статические характеристики почти всех этих датчиков нелинейны, но практически в рабочем диапазоне эта нелинейность незначительна.
К датчикам с релейной характеристикой относятся различные контактные датчики механических перемещений (например, конечные выключатели), электромагнитные и пневматические реле, электродные (контактные) датчики уровня различных сред, ртутные контактные термометры и т. д.
Непрерывные нелинейные характеристики можно линеаризовать, проведя определенным образом секущую (штриховая линия на рисунке 13, а, г). При небольшой зоне нечувствительности можно линеаризовать и характеристику, показанную на рисунке 13, е, заменив ее штриховой; возможно это и при небольшой величине петли гистерезиса. Если у характеристики с зоной нечувствительности используется одна ветвь (нереверсивная), стараются работать на линейной части характеристики после зоны нечувствительности.
Линеаризация, позволяя значительно упростить расчеты и анализ систем автоматического регулирования, ведет при этом к дополнительным ошибкам, поэтому нужно, чтобы реальные характеристики датчиков были близки к линейным непрерывным характеристикам.
В общем случае аналитическое выражение для непрерывной линейной характеристики (рисунок 13, д) записывается как уравнение прямой линии, не проходящей через начало координат:
у = уо + Sх.
Коэффициент называют чувствительностью датчика.
Для нелинейных характеристик величина  не является постоянной величиной.
не является постоянной величиной.
Для однородных преобразователей величину S называют коэффициентом усиления.
Порогом чувствительности датчика называют по абсолютному значению величину входного сигнала, при которой начинает изменяться выходной сигнал. В зоне пороговой нечувствительности выходной сигнал остается постоянным при изменении входного сигнала. Для характеристики на рисунке 13, е при начальных значениях порог чувствительности определяется величиной а.
Для статических характеристик релейных датчиков можно определить коэффициент возврата КВ (см. рисунок 13, в, ж, з)
 .
.
Релейные датчики по сравнению с непрерывными обладают такими преимуществами, как простота и высокая надежность, высокий коэффициент усиления по мощности.
Динамическая характеристика датчика определяет изменение его выходной величины во времени при изменении входной величины.
Большинство простых промышленных датчиков (датчики температуры, давления, перемещения) по динамическим свойствам можно отнести к апериодическому звену первого порядка с постоянной времени Т, характеризующей их инерционность. Небольшой величиной запаздывания τ обычно пренебрегают.
В техническом паспорте инерционность датчика характеризуется быстродействием (ч, мин, с), определяемым отрезком времени от момента подачи на вход скачкообразного воздействия до момента установления на выходе значения выходной величины, равной 0,67 установившегося значения при нулевых начальных условиях. Для апериодического звена первого порядка эта величина равна величине постоянной времени Т.
Если инерционность (быстродействие) датчика значительно меньше (больше), чем инерционность (быстродействие) объекта измерения, то в практических расчетах динамические свойства датчика (постоянные времени, запаздывание не учитывают. Датчик рассматривают как безынерционное звено с коэффициентом усиления, равным чувствительности датчика S.
Качество работы датчика характеризуется погрешностью его измерений. Погрешность оценивается по отношению к номинальной характеристике датчика, определяемой как некая средняя линия для множества статических характеристик датчиков данного типа (партии) и приводимая обычно в техническом паспорте на данный датчик.
Различают статическую и динамическую составляющие погрешности. Величина статической составляющей не зависит от скорости изменения измеряемого параметра и динамических свойств датчика, а величина динамической составляющей зависит как от скорости изменения измеряемого параметра, так и от его динамических свойств. Увеличение быстродействия датчика уменьшает динамическую составляющую погрешности.
Следует отличать погрешность измерения датчиком данной величины от общей погрешности измерения заданного параметра объекта. На общую погрешность может оказать влияние, например, неправильный, неправильный выбор места установки датчика на объекте, нарушение условий его эксплуатации и т. п.
Погрешность измерения датчика находится по отклонению его реальной характеристики от номинальной и определяется как разность
∆у = ур — ун или ∆х=хн - хр .
Это так называемые абсолютные погрешности измерения по выходной и входной величинам, выраженные в единицах измерения этих величин.
Абсолютная погрешность не может служить мерой точности датчика, так как, например ∆ х = 0,5 В при х = 1000 В достаточно мало, но при х = 1 В очень велико. Поэтому вводят понятие относительной погрешности
 .
.
Так как величина относительной погрешности изменяется при величины х и у, а при х или у равном нулю становится равной бесконечности, вводят понятие приведенной погрешности.
Метод уравновешивания позволяет получать меньшую результирующую погрешность, чем метод прямого преобразования. Погрешности прямых преобразователей, охваченных обратной связью, практически не оказывают влияния на результаты измерения, и чувствительный элемент работает при малых отклонениях.
В реальных конструкциях датчиков различают по виду сигнала обратной связи схемы с механической и электрической (или пневматической) компенсацией. Среди схем с механической компенсацией выделяют схемы компенсации перемещения и схемы силовой компенсации.
Наибольшее распространение получают в последнее время компенсационные статические схемы с силовой компенсацией.
К современным датчикам, обеспечивающим высокую эффективность их использования в автоматических системах управления на обогатительных фабриках, предъявляют следующие требования:
- высокая точность, определяемая классом прибора, в пределах 0,5-1,0 и только для ряда датчиков (датчиков расхода загрязненных сред, датчиков вещественного состава и т. п.) в пределах 1,5-2,5;
- малый порог нечувствительности в пределах 0,1- 0,05%;
- непрерывная и линейная зависимость для параметров объекта, требующих точного регулирования;
- высокая надежность в заданных условиях эксплуатации с вероятностью безотказной работы в пределах 0,9-0,95 за 2000 ч;
- малая инерционность (высокое быстродействие), на порядок меньше (выше), чем по данному параметру у контролируемого объекта;
- отсутствие заметного влияния на контролируемый объект среду, т. е., как правило, чувствительные элементы датчиков должны быть малогабаритными;
- высокая стабильность показаний и устойчивость к внешним помехам;
- возможность работы в агрессивных, пожаро- и взрывоопасных средах;
- потребление небольшой мощности;
- высокая унификация (по параметрам выходных сигналов габаритам и т. п.);
- удобство в обслуживании и ремонте.
Ряд требований (малые себестоимость и габариты), находятся в противоречии с другими требованиями (высокая точность, надежность и т. п.), поэтому при выборе датчика необходимо предъявлять к нему разумные, обоснованные требования и учитывать экономический эффект от его внедрения.
Общепромышленные датчики широкого назначения.
Среди большого количества промышленных датчиков выделить датчики, которые применяются очень широко в различных отраслях промышленности в качестве самостоятельных источников информации и как составные элементы других, более сложных датчиков. К этим датчикам можно отнести датчики механических перемещений, усилий, давления и перепада давления, расхода жидкости и газов, температуры.
Датчики механических перемещений могут быть применены как самостоятельные устройства для контроля положения движущихся объектов или их частей; но главным образом их применяют как преобразующие элементы в других датчиках и устройствах.
Для контроля дискретных положений каких-либо движущихся объектов или отдельных частей устройств применяют обычно датчики, имеющие релейную статическую характеристику (см. рисунок 13, в). Наиболее распространены контактные электрические датчики, в которых под действием движущегося элемента происходит резкое скачкообразное перемещение (замыкание или размыкание) подвижных контактов. Это приводит к релейному изменению тока в измерительной цепи, которое фиксируется каким-нибудь электромагнитным реле. Датчики крайних положений называются конечными выключателями, а промежуточных — путевыми или просто контактными датчиками положения.
В пневматических механических выключателях при нажатии на входной элемент происходит закрытие или открытие пневматического канала, что приводит к резкому возрастанию или уменьшению давления воздуха в измерительной цепи, которое в дальнейшем преобразуется в релейный пневматический или электрический сигнал. Пневматические выключатели применяют во взрывоопасных или очень увлажненных средах.
Преимуществами релейных датчиков механических перемещений являются их простота и дешевизна.
Средства измерения и представления информации.
Устройства данной группы, предназначенные для визуального представления информации человеку-оператору и для выдачи сигналов в группу специальных средств обработки информации и выработки команд управления, могут быть классифицированы по следующим признакам: назначение, вид отображения информации, вид отображаемой информации, форма представления информации, вид, входного сигнала.
Различают аналоговые и дискретные методы представления измерительной информации. В обоих случаях простейшей формой выдачи является отображение результатов измерения на визуально считываемой шкале указывающего устройства.
По назначению средства делятся на две основные группы. Первую из них составляют средства измерения, которые выполняют операции измерения (сравнения с мерой) и представления результатов в форме, удобной для восприятия человеком и другими техническими средствами. Ко второй группе относятся средства, предназначенные только для отображения результатов измерения и их обработки, выполненных другими средствами.
Рассмотрим классификацию средств измерения. По виду отображения информации различают регистрирующие и показывающие средства. Регистрация производится на специальных долговременных носителях информации, для цифровых ВП в память и на внешние носители информации, для аналоговых – на диаграммную бумагу и т. п.
По виду отображаемой информации, регистрирующие и показывающие средства измерения делятся на непрерывные (запись линией), дискретные (печатание знаков — цифр, букв) и комбинированные.
По форме представления информации регистрирующие средства измерения можно подразделить на графические и знако - графические, а показывающие – на графические, знаковые и с указателем на шкале (стрелка, световое пятно).
Среди графических регистрирующих средств измерения можно выделить самопишущие приборы (запись на диаграммной бумаге) и двухкоординатные графопостроители. Знакографические регистрирующие средства имеют то же деление, но запись в них для отдельных точек производится цифрами и буквами.
Показывающие измерительные устройства подразделяются на стрелочные, со световым пятном, цифровые.
По виду измеряемых величин измерительные средства можно подразделить на электрические, пневматические и гидравлические.
В свою очередь электрические приборы подразделяют на вольтметры, амперметры, измерители параметров электрических цепей, приборы частотно-временной группы, комбинированные приборы, фазометры.
Признаки классификации средств представления информации аналогичны классификационным признакам средств измерения.
В этой группе средств более развиты средства с графической и знаковой формой представления информации, определяемые развитием средств вычислительной техники. Входные сигналы этих средств имеют дискретный (цифровой) характер. Здесь более развиты показывающие средства в виде дисплеев, например, универсальные знакографические индикаторы-дисплеи. К группе показывающих средств относятся и различные индикаторы событий (сигнальные табло, мнемосхемные и т. п.).
Современные агрегатированные комплексы, предназначенные для использования в АСУТП, имеют разнообразные технические средства измерения и представления информации.
По наличию в измерительных приборах различных дополнительных выходных устройств, предназначенных для связи со средствами представления информации, со средствами выработки команд управления и со средствами воздействия на объект регулирования, различают следующие модификации приборов:
с задающими устройствами, вырабатывающими сигнал, пропорциональный разнице между заданным и действительным значением параметра;
с регулирующими устройствами, вырабатывающими электрический или пневматический сигнал по типовому закону регулирования, действующий на исполнительные устройства систем регулирования.
По количеству одноименных измеряемых параметров показывающие измерительные приборы подразделяют на одно- и многоканальные, по количеству регистрируемых — на одно- и многоточечные. Приборы с разноименными измеряемыми параметрами, имеющие несколько шкал и указателей, называют многошкальными.
В общем случае в зависимости от выполняемых функций во вторичном приборе могут быть выделены следующие основные элементы: входная измерительная схема, усилительно-преобразующее устройство, индицирующее устройство (указатель), устройство записи и дополнительные выходные устройства.
Контроль и управление объектами в АСУТП происходит путем передачи на определенные расстояния измерительной и командной информации.
Передача информации на место ее потребления должна быть осуществлена с минимальными искажениями (потерей) информации и с максимальным быстродействием (скоростью) при экономически целесообразных затратах.
В зависимости от расстояния различают дистанционный и телемеханический способы передачи информации.
При дистанционном способе, применяемом для небольших расстояний (десятки метров - для гидравлических, сотни метров - для пневматических, несколько километров - для электрических сигналов), специальные средства и методы передачи сигналов не применяют.
В дистанционных системах контроля и управления сигналы передаются обычно в аналоговом виде по обычным индивидуальным каналам связи (многопроводным - для электрических и многотрубным - для пневмо- и гидравлических сигналов). Однако с увеличением расстояния передачи возникают все большие искажения информации, падает быстродействие и возрастает стоимость из-за увеличения стоимости линий связи (кабелей, проводов, импульсных трубок).
Для увеличения дальностей и скорости передачи информации и для снижения ее стоимости применяют специальные средства и способы телемеханики.
Телемеханические системы в зависимости от выполняемых функций подразделяют на системы телеизмерения (ТИ), телесигнализации (ТС), телеуправления (ТУ) и телерегулирования (ТР). Большинство технических средств и способов телемеханики являются общими для всех этих систем.
В телемеханической системе ТИ и ТС можно выделить два комплекта аппаратуры: передающий и приемный, соединенные между собой линией связи. Структурная схема телемеханической информационной системы показана на рисунок 14.
Рисунок 14 - Структурная схема телемеханической информационной системы
В передающем комплекте сигналы об измеряемых параметрах Х1, Х2, …, Хn с измерительных преобразователей 1 (датчиков) поступают на коммутирующее устройство 2, далее на шифратор 3 и в линию связи. По линии связи сигналы поступают в приемный комплект, где дешифруются в дешифраторе 4 и с помощь коммутатора 5 распределяются на устройства измерения и представления информации 6.
Следует отличать канал связи и линию связи.
Каналом связи называется совокупность технических средств,
обеспечивающих передачу сообщений по линии связи от одного
источника информации к одному приемнику. Канал связи образуется за счет определенных средств и способов передачи сигналов на одной и той же линии связи может быть несколько каналов связи.
В качестве линий связи используют проводные линии связи, линии электропередач и радиолинии для электрических сигналов и импульсные трубки для пневматических сигналов.
В зависимости от вида сигнала и способа его преобразования телемеханические системы подразделяют на системы с сигналами интенсивности, с модулированными сигналами и с цифровыми
и нецифровыми кодированными сигналами.
Если использование токовых сигналов в системах интенсивности позволяет увеличить дальность передачи сигналов до нескольких километров, то использование частотных и импульсных сигналов позволяет передавать сигналы на сотни и тысячи километров, а контроль и управление подвижных объектов (например, самосвалов на карьерах) возможен только по частотным радиоканалам.
Использование импульсных сигналов в пневматических система позволяет увеличить максимальную дальность передачи сигналов с 300 м до одного километра.
Коммутаторы предназначены для разделения сигналов как
по времени, так и по различным местным цепям. Они производят
поочередное подключение к линии связи источников и приемников сигналов.
При наличии коммутаторов на передающем и приемном комплекта производится синхронное (во времени) подключение к линии связи соответствующих друг другу источников и приемников сигналов.
В телемеханических системах с модуляцией сигналов и в кодоимпульсных системах необходимым элементом являются прямые преобразователи-шифраторы сигналов и обратные преобразователи-дешифраторы. В прямых преобразователях происходи преобразование измеренной величины в импульсные или непрерывные частотные (обычно синусоидальные) сигналы. На вход прямых преобразователей непрерывный сигнал поступает обычно в виде механического перемещения, электрического напряжения или давления пневматического сигнала.
| <== предыдущая лекция | | | следующая лекция ==> |
| ИСТОРИЯ ГОСУДАРСТВА И ПРАВА СТРАН ДРЕВНЕГО ВОСТОКА. | | | Раздел 1. Зарождение и начальный период российской государственности. Введение. История в жизни общества и офицера. |
Дата добавления: 2015-10-05; просмотров: 3674;