Механизмы подъема
1.3.1. Общая характеристика и параметры
Механизмы подъема преобладающего большинства грейферных портальных кранов оснащены двухмоторными лебедками с независимыми барабанами (см. рис. 1.2), реже встречаются планетарные лебедки. Часть кранов предназначена для работы с одноканатным грейфером при однобарабанной лебедке. В двухбарабанных лебедках портальных кранов расположение барабанов, как правило, параллельное (см. рис. 1.2) и значительно реже соосное.
Двухмоторная лебедка с независимыми барабанами состоит из двух однобарабанных лебедок; одна из них управляет замыкающим канатом, а другая поддерживающим. При черпании работает только замыкающая лебедка, тормоз поддерживающей лебедки открыт для поддержания слабины каната. При подъеме груженого грейфера работают обе лебедки. В начале подъема двигатель поддерживающей лебедки нагружен меньше и вращается быстрее, поддерживающий канат движется с некоторым опережением и принимает на себя часть веса груженого грейфера; скорости канатов и двигателей выравниваются, когда нагрузки на канаты становятся одинаковыми. Своевременное включение поддерживающего двигателя при переходе от черпания к подъему осуществляет дифференциальный переключатель (механический, сельсинный и др.), работающий в функции разности длин канатов, намотанных на замыкающий и поддерживающий барабаны, и переключающий двигатели в конце закрытия или раскрытия грейфера. В зависимости от системы управления переходом от черпания к подъему меняются динамические нагрузки на конструкцию крана при отрыве грейфера.
Мощности двигателей принимаются одинаковыми и равными 0,6N, где N – мощность, необходимая для подъема груженого грейфера.
Для работы со штучными грузами обычно поставляется крюковая подвеска, которая с помощью двух отрезков каната со специальными замками подвешивается к канатам вместо грейфера. При работе с крюковой подвеской грейферные канаты (рис. 1.16,а) перепасовываются таким образом, чтобы создать равную нагрузку на канаты. При работе двумя независимыми лебедками (рис. 1.16,б) их двигатели синхронизируются, при работе одной (поддерживающей) лебедкой (рис. 1.16,в) груз 1 поднимается в верхнее положение (размер А = (1,5 –2) м), причем цепи поддерживающих канатов проходят сквозь ограждение 2 груза 1.
Особым требованием к механизмам подъема монтажных портальных кранов является обеспечение нескольких скоростей механизма подъема.
|
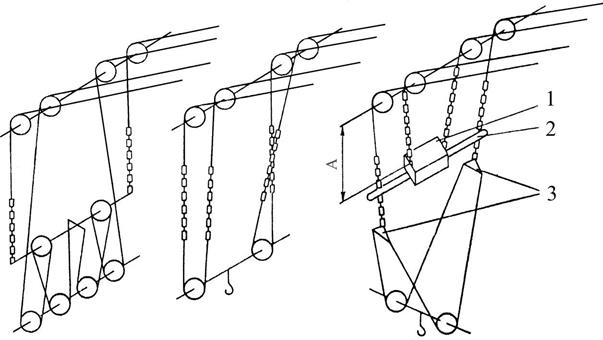 Рис. 1.16. Схемы запасовок канатов портального крана с независимыми лебедками при работе с грейфером (а) и крюком двумя (б) и одной (поддерживающей) (в) лебедками:
1 — груз; 2 — ограждение; 3 — траверса.
Рис. 1.16. Схемы запасовок канатов портального крана с независимыми лебедками при работе с грейфером (а) и крюком двумя (б) и одной (поддерживающей) (в) лебедками:
1 — груз; 2 — ограждение; 3 — траверса.
|
Несколько скоростей можно получить, применяя специальные системы привода; при этом возможно бесступенчатое (при использовании тиристорного управления) или ступенчатое (при использовании двигателей с переключаемым числом пар полюсов) регулирование скорости. Эту задачу можно решить также, используя подвески с переменной кратностью полиспаста, лебедки с микроприводом, планетарные, с редукторами с переменным передаточным числом.
Согласно «Правилам устройства и безопасной эксплуатации грузоподъемных кранов» [12], у грейферных двухбарабанных лебедок с раздельным приводом тормоз должен быть установлен на каждом приводе.
При приводе поддерживающего барабана допускается устройство педали (кнопки) для растормаживания механизма при неработающем двигателе; при этом растормаживание должно быть возможным только при непрерывном нажатии на педаль (кнопку).
1.3.2. Приборы безопасности
Согласно «Правилам устройства и безопасной эксплуатации грузоподъемных кранов» [12], ограничитель механизма подъема груза должен обеспечивать остановку грузозахватного органа при подъеме без груза с зазором между грузозахватным органом и упором не менее 200 мм. При скоростях подъема груза более 40 м/мин на кране должен быть установлен дополнительный ограничитель, срабатывающий до основного ограничителя и переключающий схему на пониженную скорость подъема. У грейферных кранов с раздельным приводом подъемной и замыкающей лебедок ограничитель (ограничители) должен отключать одновременно оба двигателя при достижении грейфером крайнего верхнего положения.
Портальные краны в соответствии с «Правилами устройства и без-опасной эксплуатации грузоподъемных кранов» для предупреждения их опрокидывания должны быть оборудованы ограничителем грузового момента, автоматически отключающим механизмы подъема груза и изменения вылета в случае подъема груза, масса которого превышает грузоподъемность для данного вылета более чем на 15 %. После срабатывания ограничителя грузового момента должна быть обеспечена возможность опускания груза или включения других механизмов для снижения действующего грузового момента.
Ограничитель грузового момента (ОГМ) и ограничитель грузоподъемности (ОГП) близки по назначению и целям, но несколько отличаются по функциональным возможностям. Цель установки ОГП – защита металлических конструкций и элементов крана от следующих воздействий: 1) чрезмерных пластических деформаций; 2) потери устойчивости (для металлических конструкций); 3) хрупкого разрушения; 4) усталостных повреждений. Для ОГМ добавляется защита крана от опрокидывания.
Предотвращение повреждений по пунктам 1, 2, 3 требует ограничения максимальных нагрузок независимо от длительности их действия. Защита элементов металлических конструкций от усталостных повреждений требует ограничения действующих в них напряжений.
Конструкции ОГП и ОГМ достаточно многообразны [14, 16] и различаются:
1) по числу параметров, срабатывания; для ОГП это один параметр — вес груза; для ОГМ портальных кранов с переменной грузоподъемностью два параметра — вес груза и вылет стрелы; для других типов кранов параметров может быть больше;
2) по способу сравнения фактических параметров с предельными, в зависимости от которых ограничители бывают механическими (грузовыми, пружинными, торсионными, рычажными, эксцентриковыми), электромеханическими и электронными.
В рычажном ОГМ портального крана с переменной по вылету грузоподъемностью (рис. 1.17) предельное равновесие наступает при N а = Gгр b c / d (при больших вылетах, когда канат не касается блока Е, а угол w < wо) или при N0 a0 = Gгр b c / d, когда канат касается блока Е.
В первом случае натяжение S, вызывающее предельное значение Nа, возрастает с уменьшением вылета и угла обхвата блока А канатом, что соответствует криволинейной части графика допустимой части графика допустимой грузоподъемности (см. рис. 1.14). Касание канатом блока Е (угол w0) соответствует узловой точке графика грузоподъемности; при дальнейшем уменьшении вылета (угол w*) угол обхвата блока А не изменится и допустимая грузоподъемность остается постоянной (горизонтальная часть графика на рис. 1.14).
В эксцентриковом ОГМ портального грейферного крана (рис. 1.18) блоки замыкающего и поддерживающего канатов установлены на эксцентриках 2 и 3 с эксцентриситетами eп и eз. Предельное равновесие рычага 4 с грузом весом Gгр будет при Nз lз+Nп lп = Gгр b, т. е. если сумма натяжений Sз + SП в замыкающем и поддерживающем канатах соответствует предельной грузоподъемности. Эксцентриковые ОГМ компактнее рычажных.
В настоящее время первенство перешло от механических к электронным ОГМ. Датчиком усилия обычно является магнитоупругий элемент, который встраивается в опоры барабанов подъемных лебедок или эти барабаны устанавливаются на рычагах [16]. Сигнал с датчика преобразуется и усиливается, в результате чего на выходе ОГМ возникает напряжение, пропорциональное натяжению грузовых канатов, которое передается на исполнительное устройство. Обычно электронные системы оборудуются взвешивающим устройством с указателем в цифровом виде веса поднимаемого груза, возможно суммирование полезных грузов за определенный отрезок времени (смену, сутки) и хранение этой суммы в памяти с последующей выдачей на табло или печатающее устройство.
 Рис. 1.17. Рычажной ограничитель грузового момента портального крана с переменной по вылету грузоподъемностью: 1 — рычаг; 2 — втулка; 3 — концевой выключатель; 4, 5 — упоры; 6 — груз ограничителя.
Рис. 1.17. Рычажной ограничитель грузового момента портального крана с переменной по вылету грузоподъемностью: 1 — рычаг; 2 — втулка; 3 — концевой выключатель; 4, 5 — упоры; 6 — груз ограничителя.
|
Следует признать, что подавляющее большинство конструкций ОГМ таковыми вовсе не являются, так как в силу конструктивных и функциональных особенностей ограничение осуществляется не по величине массы груза, а по некоторому предельному уровню динамических нагрузок в момент подъема. Этот недостаток пытаются устранить применением в механических ОГМ демпферов, а в электронных — корректирующих устройств, которые дают выдержку времени для исключения срабатывания ОГМ по динамической нагрузке.
Рис. 1.18. Эксцентриковый ограничитель грузового момента портального грейферного крана: 1 — металлоконструкция каркаса поворотной части крана; 2, 3 — эксцентрики; 4 — рычаг с грузом ограничителя; 5 — концевой выключатель.
Разрабатываются конструкции электронных ОГМ, имеющих два уровня срабатывания — по динамической и по статической нагрузкам, причем уровень динамической нагрузки может перестраиваться. Это исключает ложные срабатывания ОГМ при работе с грузами, меньшими номинальных.
Применяемый в настоящее время способ управления механизмами подъема при срабатывании ограничителя грузоподъемности состоит в том, что происходит только отключение двигателя и наложение тормозов. Однако динамический анализ процесса срабатывания ОГМ позволяет сделать вывод [16], что при простом отключении двигателя механизма подъема вращающиеся массы, находящиеся в движении при срабатывании ОГМ, могут привести к отрыву груза от основания и машина оказывается перегруженной до тех пор, пока крановщик не опустит груз. Для устранения этого недостатка предлагаются различные способы, один из которых состоит в том, что после срабатывания ОГМ двигатель кратковременно работает на спуск.
Следует отметить, что быстродействие ОГМ у стреловых кранов может быть ниже, чем у мостовых. В стреловых кранах при задержке в срабатывании ОГМ груз чрезмерной массы не отрывается от опоры и кран не опрокидывается. Потеря устойчивости крана может произойти только при длительной работе механизма подъема на подъем грузов недопустимой массы. Кратковременные динамические нагрузки не приводят к опрокидыванию крана, и ОГМ может не реагировать на них.
Дата добавления: 2015-02-19; просмотров: 6516;